How to update Fairino Robot Software
Step 1)
- Navigate to the Fairino documentation page here
- Use the version select button in the bottom right to select the target software version you wish to migrate to (please note the compatibility table below):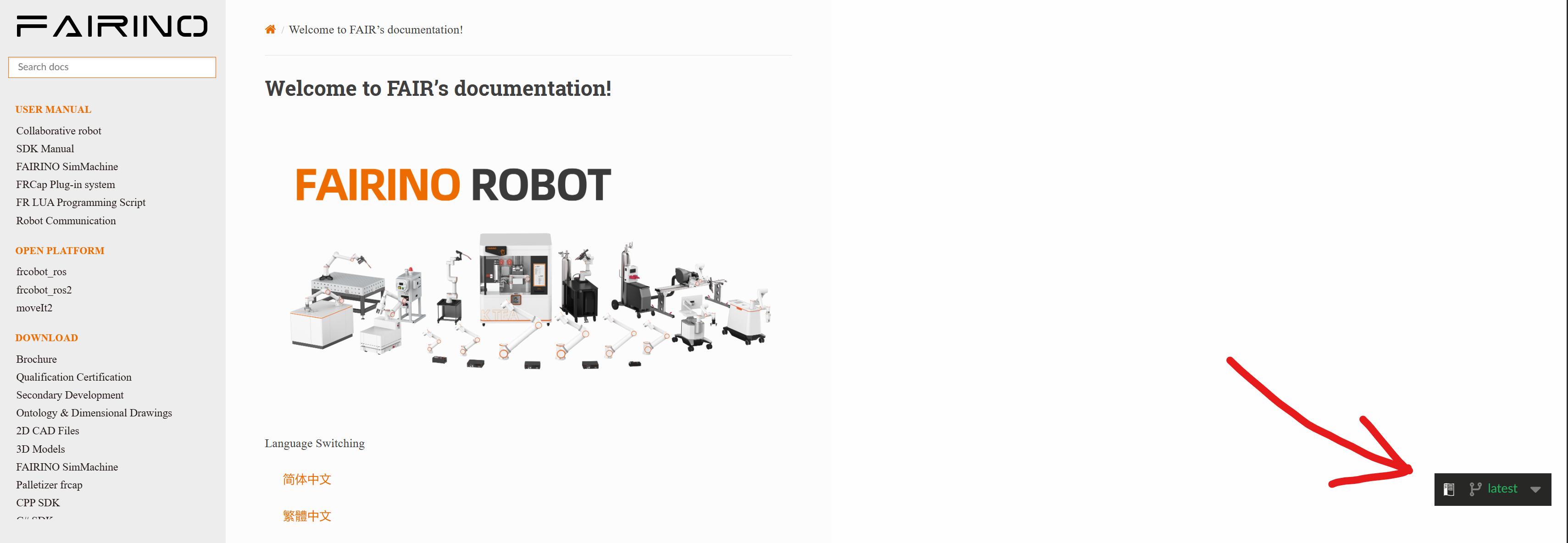
| Current Version | Maximum Upgradable Version |
| <3.6.1 | 3.6.1 |
| 3.6.1 - 3.6.4 | 3.6.5 |
| 3.6.5 - 3.6.8 | 3.6.9 |
| 3.6.9 - 3.7.4 | 3.7.5 |
| 3.7.5 - 3.7.7 | 3.7.8 |
3.7.8 - 3.8.1 | 3.8.2 |
| 3.8.2 - 3.8.7 | 3.9.0 |
| >= 3.9.0 | No restrictions |
Step 2)
- Navigate to the "Robot Software" tab on the left (Shown below)
- Select the software.zip file for your desired robot version. Download and unzip the files
- NOTE: Some version have both "LA" and "QX" versions. All United States Fairinos should use the "QX" release.
Step 3)
- Log into the robots WebApp (default IP address 192.168.58.2)
- Navigate to Auxiliary ->Tool App -> Software Upgrade
- Note: Some older web versions may have different tab names (ie. "Application" instead of "Auxiliary")
Step 4)
- Select "upload file" and upload the software.tar file you just downloaded.
- Click "Upgrade" and wait for install to complete
- After upgrading, power cycle your control box and you will have successfully upgraded you Fairino Software!
NOTE: If you are using the SDK, you will need to install the corresponding SDK version for the new software version.
Related Articles
Unable to reach Web App after software upgrade
Reestablishing WebApp Connection After Software Upgrade After trying to upgrade Robot Software, some users end up seeing this pop-up when trying to log back into the Web App (or an empty pop up window when trying to enable the robot in the WebApp). ...Fairino FAQ
Q: How do I connect my DH gripper to my Fairino? A: Follow the instructions linked here ...Getting Started with the FAIRINO MoveIt2 Plugin
Overview In this tutorial, we focus on the installation and setup of a basic MoveIt2 environment using the FR5 cobot model. By the end of this tutorial, you should have a basic understanding of MoveIt2, and how to launch a functional planning ...Connecting an XJC Force/Torque Sensor to Fairino Cobot
This article will cover the steps needed to connect your XJC force/torque sensor to the end of a Fairino Cobot arm Hardware required: - 1 XJC force sensor - 1 Fairino Cobot - 1 computer with ethernet connection to Control box/button box OR 1 teach ...Fairino Does Not Enable
What to do when you're Fairino is not Enabling: Check the following as each check may have a different set of steps to fix it: First, make sure you are able to: 1) Ping the robot ***If you can not ping the robot, refer to the article linked here*** ...